Визуальная обратная связь
Под визуальной обратной связью в данном случае подразумивается возможность робота восстанавливать азимутальный угол поворота по видеоизображению.
Наличие возможности определения по видеоизображению угла азимутального поворота имеет огромное значение при проектировании системы управления и конструкции интеллектуального мобильного робота. Отказавшись от пьезоэлектрических или механических гироскопов, переложив их задачу на СТЗ, разработчик может упростить аппаратную часть системы управления, и, как следствие, облегчить конструкцию робота.
Разработанный в данной работе метод позволяет по видеоизображению определить изменение угла азимутального поворота робота за такт расчета.
Рассмотрим этот метод.
1. Видеоизображение для уменьшения числа производимых операций уменьшается в размерах в 4 раза по вертикали и горизонтали (и того в 16 раз). При этом нижние и верхние 15-20% изображения отсекаются (т.к. эти части изображения могут вносить существенную погрешность для данного метода).
2. Сопоставляются два уменьшенных изображения полученных на текущем и предыдущем кадрах. При этом одно из изображений сдвигается относительно другого на величины Dx и Dy (по горизонтали и вертикали соответственно). Затем при каждом сравнении вычисляется функция сравнения P(Dx, Dy) и находится такие значения Dxmin и Dymin, при которых значение функции P(Dxmin, Dymin) имеет минимальное значение:
Где:
Wsmall, Hsmall - ширина и высота уменьшенного изображения.
Dx - смещение по горизонтали одного изображения относительно другого.

Dy - смещение по вертикали одного изображения относительно другого.
S(Dx, Dy) - площадь общей зоны двух изображений (см. Рис. 1).
V(Dx, Dy) - функция, возвращающая сумму модулей разности яркостей пикселей одного и другого изображения, сдвинутых друг относительно друга на Dx и Dy (см. Рис. 1).
Рис. 1 Схема сравнения изображений
Таким образом, после завершения всех итераций сравнения, получается значение величины Dxmin, при которой достигается минимум функции P(Dx, Dy). По значению величины Dxmin вычисляется результирующее значение величины Da, которая является изменением угла поворота робота за такт расчета:
Здесь:
FOVx - угол обзора камеры по горизонтали.
Однако было замечены сбои алгоритма при повороте робота около идеально ровной монотонной стены или при выключенном свете. Это объясняется тем, что два последовательных кадра видеоизображения в этом случае практически не имеют различий, поэтому не содержат признаков поворота.
Следует подчеркнуть, что данные получаемые системой визуальной обратной связи в блоке сравнения дополнительно сравниваются с моделью робота, что позволяет оценивать их правдоподобность.
Экспериментальные исследования визуальной обратной связи
Опыт 1.
При ручном режиме управления повернем робота на 90° (Рис. 2. а-е). Замерим угол поворота робота, оцененный по визуальной обратной связи. Он составляет 92°, что примерно равно реальному углу поворота.
Заметим, что вместе с поворотом робота поворачивается локальная карта местности. Причем локальная карта местности дополнилась препятствиями в невидимой (серой) зоне.
Опыт 2.
Приподнимем робота над землей (Рис. 2, ж). В таком состоянии повернем робота приблизительно на 90° (Рис. 2, к). С помощью алгоритмов обратной связи был определен угол поворота 96° (Рис. 2, з,и,л,м), что также близко к реальному углу поворота. Чистоту эксперимента нарушает погрешность измерения эталонного угла поворота, т.к. робота поворачивал человек, держа его в руках.
При эксплуатации робота были замечены некоторые недостатки алгоритма. При повороте робота около монотонной стены, в темноте или при ярком слепящем свете алгоритм неправильно определяет угол поворота. Причины этого были объяснены при описании метода.
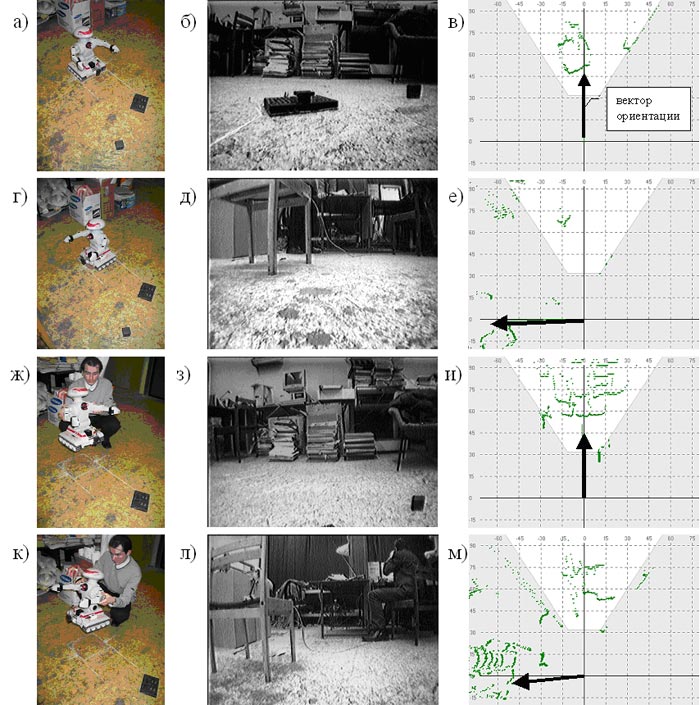 |
| Рис. 2. Экспериментальные исследования алгоритма оценки азимутального угла поворота робота по визуальной обратной связи: а) Внешний вид робота до начала поворота; б) Изображение с телекамеры робота до начала поворота; в) Локальная карта местности до поворота; г) Внешний вид робота после поворота на 90?; д) Изображение с телекамеры робота после поворота на 90?; е) Локальная карта местности после поворота на 90?; ж) Эксперимент с приподнятым над землей роботом: внешний вид до начала поворота; з) Эксперимент с приподнятым над землей роботом: изображение с телекамеры робота; и) Эксперимент с приподнятым над землей роботом: локальная карта местности до поворота; к) Эксперимент с приподнятым над землей роботом: внешний вид после поворота; л) Эксперимент с приподнятым над землей роботом: изображение с телекамеры робота после поворота; м) Эксперимент с приподнятым над землей роботом: локальная карта после поворота |